It looks like you're using an Ad Blocker.
Please white-list or disable AboveTopSecret.com in your ad-blocking tool.
Thank you.
Some features of ATS will be disabled while you continue to use an ad-blocker.

Nitinol project by 3 Ats Members part deux
page: 2share:
reply to post by sotaxme
Another way to look at the power (work) of Nitinol is this: The maximum mechanical work in inch-pounds per cubic inch of alloy starts out at about 400 when the strain is at 2%, and rises dramatically to 2600 at 7.5% strain. While this does appear to be high, and it is, consider the volume of alloy (in say, cubic inches) that is required to achieve a given power output. And of course, then you run into the issue of speed. Whatever that volume of Nitinol is, you have to get the heat out of it in order to return below its Martensitic Transition. As you increase the thickness of your alloy in order to obtain higher work force, it takes more time to get that temperature out of the alloy's core. Attempting to force Nitinol to change its shape while above Martensitic Transition can cause degredation of its trained shape. The more surface area you can expose to your cooling method will help, and one option is a rectangular cross-section instead of round wire. The faster you can get that temperature below TTR, the faster your engine will be. Rectangular bands cool faster than round wire in general.
73
Another way to look at the power (work) of Nitinol is this: The maximum mechanical work in inch-pounds per cubic inch of alloy starts out at about 400 when the strain is at 2%, and rises dramatically to 2600 at 7.5% strain. While this does appear to be high, and it is, consider the volume of alloy (in say, cubic inches) that is required to achieve a given power output. And of course, then you run into the issue of speed. Whatever that volume of Nitinol is, you have to get the heat out of it in order to return below its Martensitic Transition. As you increase the thickness of your alloy in order to obtain higher work force, it takes more time to get that temperature out of the alloy's core. Attempting to force Nitinol to change its shape while above Martensitic Transition can cause degredation of its trained shape. The more surface area you can expose to your cooling method will help, and one option is a rectangular cross-section instead of round wire. The faster you can get that temperature below TTR, the faster your engine will be. Rectangular bands cool faster than round wire in general.
73
Well that is disappointing... I had always figured that if I had enough nitinol In the right configuration I could actuate a bike pedal fairly easily.
I think I'll still experiment a little bit just to see what is possible.
reply to post by roguetechie
Also, it was mentioned in an earlier post that the temperature transition that Nitinol reacts at (TTR) is determined by how much time it is kept in the annealing stage of training. While this does have a slight effect on TTR, the actual TTR which is required for a given task is predetermined by the original alloy mixture at the time of mixing the alloy's. Nitinol is seldom exactly 50/50 mix of Nickel and Titanium. It is generally closer to 45% Titanuim, and 55% Nickel. And the Nickel portion of the alloy can be Nickel by itself, or a blend of Nickel and an addition of one of a couple other elements which dramatically effect the final products capabilities. The overall blend of the elemental metals is generally calculated in terms of Moles. This simplifies the calculation, because you know exactly how many molecules of an element are in one Mole (which is referred to as Avogadro's Number).
And if you wish to take advantage of the true power of Nitinol, try to focus your thinking on Linear Engines instead of attempting to acheive rotational motion with it. While rotational motion has been accomplished with the highly efficient "Thermobile" design, the easiest, fastest inventions can be developed with one-piece solid state linear motors.....contraction and extension of rods of Nitinol in wire or rectangular form. Or by training Nitinol to be springs. And you can make these motors in your own garage with little investment in training equipment. I built an inexpensive training device myself with items from Fry's Electronics, and parts from Lowes Hardware.
There are infinite inventions waiting to be developed using linear, or spring motor action, and I am working on some myself using my training device design.
73
Also, it was mentioned in an earlier post that the temperature transition that Nitinol reacts at (TTR) is determined by how much time it is kept in the annealing stage of training. While this does have a slight effect on TTR, the actual TTR which is required for a given task is predetermined by the original alloy mixture at the time of mixing the alloy's. Nitinol is seldom exactly 50/50 mix of Nickel and Titanium. It is generally closer to 45% Titanuim, and 55% Nickel. And the Nickel portion of the alloy can be Nickel by itself, or a blend of Nickel and an addition of one of a couple other elements which dramatically effect the final products capabilities. The overall blend of the elemental metals is generally calculated in terms of Moles. This simplifies the calculation, because you know exactly how many molecules of an element are in one Mole (which is referred to as Avogadro's Number).
And if you wish to take advantage of the true power of Nitinol, try to focus your thinking on Linear Engines instead of attempting to acheive rotational motion with it. While rotational motion has been accomplished with the highly efficient "Thermobile" design, the easiest, fastest inventions can be developed with one-piece solid state linear motors.....contraction and extension of rods of Nitinol in wire or rectangular form. Or by training Nitinol to be springs. And you can make these motors in your own garage with little investment in training equipment. I built an inexpensive training device myself with items from Fry's Electronics, and parts from Lowes Hardware.
There are infinite inventions waiting to be developed using linear, or spring motor action, and I am working on some myself using my training device design.
73
IF you could show us your training rig It would be greatly appreciated. As it is now when I buy nitinol I"m going to have to buy it from an outfit
that will train it for me which will greatly increase the price. So if you can show us your training assembly that would be massively helpful.
From what I've read the best way to train nitinol is to heat it to around I think it was 600 f for about 20 minutes while it's in a jig to hold it in the position you want it to take when it's heated.
From what I've read the best way to train nitinol is to heat it to around I think it was 600 f for about 20 minutes while it's in a jig to hold it in the position you want it to take when it's heated.
reply to post by roguetechie
For simple non-linear shapes that you want to train to return to when heated, all you need is a small furnace capable of about 600 deg C. Order your wire with plenty of cold-work in the final die draw (no annealing between the final two or three draws through the wire forming dies). It will then be very stiff, and similar to spring steel, for example. For best results, you will need your wire in this state before attempting to anneal it into your final shape. Then build your shaped form that you wish the final shape to be in, and this form (jig) must be capable of high heat resistance while your alloy is in the furnace. Try doing your final annealing at about 500 deg C for around 20 minutes. While starting out your wire will have no oxide coating, and a silver color. Your final heat annealing in the furnace should result in a bluish to purple color when it is finished. This is very simple to accomplish, and you should have little trouble locating a furnace to place your jig into. If you are studying in college, there will be one in a lab somewhere there. Dont pay your supplier for this simple task (which will likely cost your the greater portion of your overall purchase). The cost of 50-100 feet is minimal in this way, and leaves you plenty to screw up with before you acheive your best results. And that is part of the learning process.... you will burn some up, but its fun. Record everything you do, so that you may compare your results as you go along. You will get movement in most of your annealing attempts, but you will eventually find one temp/time combination that will provide the best strength & travel.
Also try playing around with various diameters of steel shaft and securing your wire to the side of one end of your 3 - 4" long shaft. Then wrap your wire closely spaced, or evenly gapped around the shaft for an inch or two long spring depending on whether you want a tightly coiled spring or one that is spirally gapped down its length. Be sure to secure the final end of the wrap into the opposite end of that shaft so that it will stay in place. Then anneal using the same temp/time/color noted above. Also I should note, ALWAYS allow your jig, or spring to slow cool after removing from the furnace. Do not quench.....it seldom yields good results, but you can experiment with that nonetheless. After your spring form has cooled, you can remove it and straighten it out into a linear length of wire.... then insert it into hot water as fast as you can and it becomes an instant spring. The spring has strong form above TTR, and will collapse into a "lead-like" softened state below TTR. Many applications could be envisioned for these springs.
The training device I built is only for linear wire training in order to build linear motors. I usually dont form shapes unless a particular task requires it. My training table is designed to produce straight wire that will contract in length for linear motor power (such as artificial muscles). There is a lengthy training process involved in this, although. It is not just a matter of heating the wire up in a final anneal. It would take some time to explain, and a lot more than this forum would bear I am afraid. But I would be willing to speak with you directly if you have a linear application that requires contraction/extension.
73
For simple non-linear shapes that you want to train to return to when heated, all you need is a small furnace capable of about 600 deg C. Order your wire with plenty of cold-work in the final die draw (no annealing between the final two or three draws through the wire forming dies). It will then be very stiff, and similar to spring steel, for example. For best results, you will need your wire in this state before attempting to anneal it into your final shape. Then build your shaped form that you wish the final shape to be in, and this form (jig) must be capable of high heat resistance while your alloy is in the furnace. Try doing your final annealing at about 500 deg C for around 20 minutes. While starting out your wire will have no oxide coating, and a silver color. Your final heat annealing in the furnace should result in a bluish to purple color when it is finished. This is very simple to accomplish, and you should have little trouble locating a furnace to place your jig into. If you are studying in college, there will be one in a lab somewhere there. Dont pay your supplier for this simple task (which will likely cost your the greater portion of your overall purchase). The cost of 50-100 feet is minimal in this way, and leaves you plenty to screw up with before you acheive your best results. And that is part of the learning process.... you will burn some up, but its fun. Record everything you do, so that you may compare your results as you go along. You will get movement in most of your annealing attempts, but you will eventually find one temp/time combination that will provide the best strength & travel.
Also try playing around with various diameters of steel shaft and securing your wire to the side of one end of your 3 - 4" long shaft. Then wrap your wire closely spaced, or evenly gapped around the shaft for an inch or two long spring depending on whether you want a tightly coiled spring or one that is spirally gapped down its length. Be sure to secure the final end of the wrap into the opposite end of that shaft so that it will stay in place. Then anneal using the same temp/time/color noted above. Also I should note, ALWAYS allow your jig, or spring to slow cool after removing from the furnace. Do not quench.....it seldom yields good results, but you can experiment with that nonetheless. After your spring form has cooled, you can remove it and straighten it out into a linear length of wire.... then insert it into hot water as fast as you can and it becomes an instant spring. The spring has strong form above TTR, and will collapse into a "lead-like" softened state below TTR. Many applications could be envisioned for these springs.
The training device I built is only for linear wire training in order to build linear motors. I usually dont form shapes unless a particular task requires it. My training table is designed to produce straight wire that will contract in length for linear motor power (such as artificial muscles). There is a lengthy training process involved in this, although. It is not just a matter of heating the wire up in a final anneal. It would take some time to explain, and a lot more than this forum would bear I am afraid. But I would be willing to speak with you directly if you have a linear application that requires contraction/extension.
73
reply to post by sotaxme
OK, I'm the dumb chic sitting way in the back...the one you have to kick my chair from time to time. I don't know where this is coming from, but, what about a configuration to obtain the most motion being, a long narrow ovoid. Or, to try and give a better idea of what I'm thinking. Two parallel long sides of a narrow rectangle, the short ends being rounded instead of straight lines. The connecting rod in the center of this long narrow ovoid, being slightly off center to generate more forward force in turning. And, the arm of the connecting rod having a corresponding slight bend in it to help facilitate extra forward motion in turning. Gawd...I wish I could draw a picture to post, of what I see in my head.
I'll sign off now...I've gone from feeling dumb, to showing how nuts I really am. Not good. I'll stay on the sidelines watching you real scientists do your thing. Carry on....this is a brilliant thread.
Des
OK, I'm the dumb chic sitting way in the back...the one you have to kick my chair from time to time. I don't know where this is coming from, but, what about a configuration to obtain the most motion being, a long narrow ovoid. Or, to try and give a better idea of what I'm thinking. Two parallel long sides of a narrow rectangle, the short ends being rounded instead of straight lines. The connecting rod in the center of this long narrow ovoid, being slightly off center to generate more forward force in turning. And, the arm of the connecting rod having a corresponding slight bend in it to help facilitate extra forward motion in turning. Gawd...I wish I could draw a picture to post, of what I see in my head.
I'll sign off now...I've gone from feeling dumb, to showing how nuts I really am. Not good. I'll stay on the sidelines watching you real scientists do your thing. Carry on....this is a brilliant thread.
Des
reply to post by Destinyone
Please forgive me, but I am having a bit of trouble envisioning what you are describing. Could you be more specific. Take your time.
Please forgive me, but I am having a bit of trouble envisioning what you are describing. Could you be more specific. Take your time.
Sotaxme,
Yes I would like to have a more indepth conversation with you at some point. As soon as you have enough posts to be able to send U2U's we should arrange a way to talk.
Now here is my question for you. IN the early vids touting nitinol specifically the one from the 70's they state that Nitinol can put out a force as high as 55 tons/square inch. Was this wrong or am I looking at this number wrong somehow? I keep looking at that number and thinking of how much torque it takes to crank a bicycle pedal and going OK so we probably only need on the order of less than a tenth of a square inch to generate enough force for our needs.
If this is wrong somehow it would be good to know. As it is though I'm still pretty pleased with the fact that we have found a way to convert the motion of nitinol to unidirectional rotation. I also really like the basic design of the setup we have going. I was looking at it last night and thought to myself that it could make one heck of a mini ornithopter wing flapping actuator as it is without the double drive installed and just a straight shaft instead.
I know you are focused on the straight linear properties of nitinol expansion and contraction, which is by far the stronger force, but I still think this little design has some merit. It's very compact and it takes advantages of both the stiff phase change as well as the limp phase change in a way that I think is very innovative, I wish I could say I was responsible for the actuator design but that was all I'm a marty and I think he did a wonderful job.
I guess really our next step is to build an actuator and see how much force it really does give us, and then figure out if it scales well. I know you think this won't work but I'm thinking this might be due to me not explaining the idea well enough instead of an actual deficiency in the basic idea.
EDIT TO ADD:
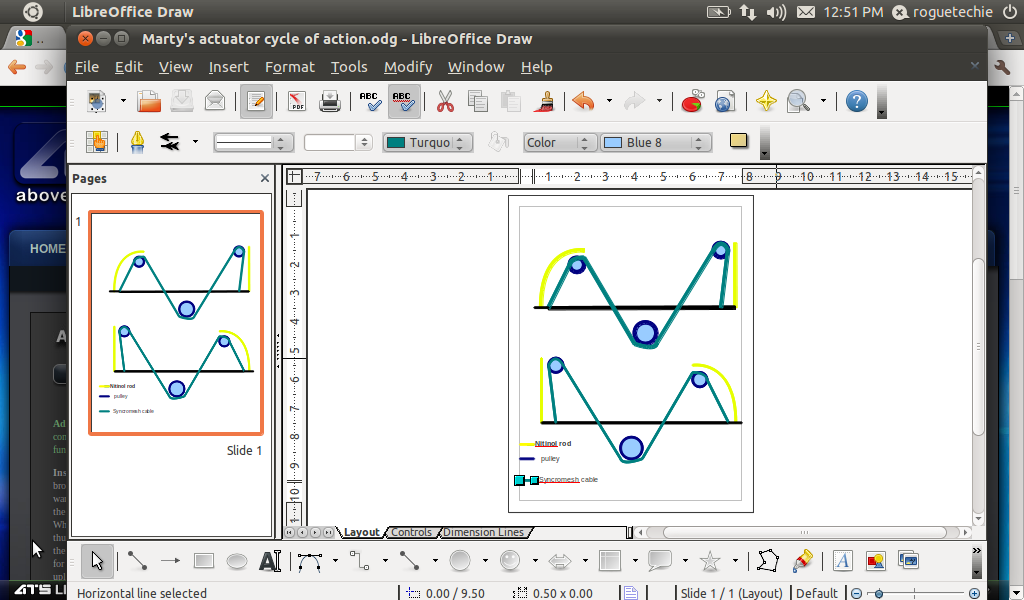 This is a picture of the actual cycle of operation of the actuator. As you can see there is no point where both nitinol
rods are bent inwards. Instead voltage or heat is applied to one side until it straightens violently pulling the other side down and into curved
profile. Then after a suitable cooloff period the bent side now has voltage or heat applied to it until it violently straightens pulling the
previously straight arm down into a curved profile. IT oscillates like this back and forth driving the central pulley which is attached to the double
drive screwdriver handle. These oscillations are then turned into 360 degree unidirectional motion by the gearing in the double drive screwdriver
creating rotational energy at the screwdriver shaft for use in propelling whatever you wish to propel. IN the original drawing I have on the first
page there are 16 separate actuators all lined up side by side down the handle of the double drive screwdriver.
This is a picture of the actual cycle of operation of the actuator. As you can see there is no point where both nitinol
rods are bent inwards. Instead voltage or heat is applied to one side until it straightens violently pulling the other side down and into curved
profile. Then after a suitable cooloff period the bent side now has voltage or heat applied to it until it violently straightens pulling the
previously straight arm down into a curved profile. IT oscillates like this back and forth driving the central pulley which is attached to the double
drive screwdriver handle. These oscillations are then turned into 360 degree unidirectional motion by the gearing in the double drive screwdriver
creating rotational energy at the screwdriver shaft for use in propelling whatever you wish to propel. IN the original drawing I have on the first
page there are 16 separate actuators all lined up side by side down the handle of the double drive screwdriver.
IN order to generate enough torque to physically turn the pedal you fire off all 16 rods on one side at once. and then you fire off the other side's rods next and so on and so forth hopefully generating enough energy to run the bicycle.
Now I'm wondering if maybe it wouldn't be best to use a myriad of individual nitinol strands instead of one large rod for each side. I think that will be the first method I do a test build on.
Yes I would like to have a more indepth conversation with you at some point. As soon as you have enough posts to be able to send U2U's we should arrange a way to talk.
Now here is my question for you. IN the early vids touting nitinol specifically the one from the 70's they state that Nitinol can put out a force as high as 55 tons/square inch. Was this wrong or am I looking at this number wrong somehow? I keep looking at that number and thinking of how much torque it takes to crank a bicycle pedal and going OK so we probably only need on the order of less than a tenth of a square inch to generate enough force for our needs.
If this is wrong somehow it would be good to know. As it is though I'm still pretty pleased with the fact that we have found a way to convert the motion of nitinol to unidirectional rotation. I also really like the basic design of the setup we have going. I was looking at it last night and thought to myself that it could make one heck of a mini ornithopter wing flapping actuator as it is without the double drive installed and just a straight shaft instead.
I know you are focused on the straight linear properties of nitinol expansion and contraction, which is by far the stronger force, but I still think this little design has some merit. It's very compact and it takes advantages of both the stiff phase change as well as the limp phase change in a way that I think is very innovative, I wish I could say I was responsible for the actuator design but that was all I'm a marty and I think he did a wonderful job.
I guess really our next step is to build an actuator and see how much force it really does give us, and then figure out if it scales well. I know you think this won't work but I'm thinking this might be due to me not explaining the idea well enough instead of an actual deficiency in the basic idea.
EDIT TO ADD:
IN order to generate enough torque to physically turn the pedal you fire off all 16 rods on one side at once. and then you fire off the other side's rods next and so on and so forth hopefully generating enough energy to run the bicycle.
Now I'm wondering if maybe it wouldn't be best to use a myriad of individual nitinol strands instead of one large rod for each side. I think that will be the first method I do a test build on.
edit on 22-7-2012 by roguetechie because: more information
reply to post by roguetechie
The correct work force is ~60 Ksi (60,000 pounds per square inch). There are a number of values out there, but this was determined by material scientists through extensive research.
Please understand that I never said your motor would not work, only that it would require so much volume (read weight), that it would not fit on a bicycle. If you can cause a generator to spin, you will create voltage. But how much electrical current are you using to heat the Nitinol through its TTR in each cycle? Surely more than you are generating in your windings. But if you are using some form of wasted heat energy to activate your Nitinol acutators, you are gaining what would otherwise be wasted energy, and converting it to electrical energy.
And yes, I probably could use a better understanding of what you are trying to accomplish. I sort of picked up on this in the middle of the conversation after being offline the last couple days. (I was on a ranch without internet access until last night).
73
The correct work force is ~60 Ksi (60,000 pounds per square inch). There are a number of values out there, but this was determined by material scientists through extensive research.
Please understand that I never said your motor would not work, only that it would require so much volume (read weight), that it would not fit on a bicycle. If you can cause a generator to spin, you will create voltage. But how much electrical current are you using to heat the Nitinol through its TTR in each cycle? Surely more than you are generating in your windings. But if you are using some form of wasted heat energy to activate your Nitinol acutators, you are gaining what would otherwise be wasted energy, and converting it to electrical energy.
And yes, I probably could use a better understanding of what you are trying to accomplish. I sort of picked up on this in the middle of the conversation after being offline the last couple days. (I was on a ranch without internet access until last night).
73
reply to post by roguetechie
Also please understand that you are only going to be able to take advantage of the 60 Ksi force in Nitinol in its linear contraction. Side force from a rod bent over while below TTR, and transitioning above it is different. For instance, you will not be able to "shove" a 60,000 # object over sideways using a one square inch rod trained to straighten out. And of course it would take unusual cooling to get it back below TTR for the next cycle.
In your favor though, you are correct in that you would only need a tiny fraction of that 60 Ksi capability to spin your generator. Rogue, I just dont want you to be confused by some of the hype out there being misconstrued concerning this 60 Ksi value. Your idea is innovative. As your Nitinol rods on each side bend, and straighten, the generator will turn, and the size of those rods would simply need to be large enough to overcome the magnetic field required by the output load your generator is supplying. As the output load increases that your generator is supplying, the magnetic field will require more force into the rotor which is being driven by your Nitinol rods bending and straightening during each cycle.
Hope this helps.
73
Also please understand that you are only going to be able to take advantage of the 60 Ksi force in Nitinol in its linear contraction. Side force from a rod bent over while below TTR, and transitioning above it is different. For instance, you will not be able to "shove" a 60,000 # object over sideways using a one square inch rod trained to straighten out. And of course it would take unusual cooling to get it back below TTR for the next cycle.
In your favor though, you are correct in that you would only need a tiny fraction of that 60 Ksi capability to spin your generator. Rogue, I just dont want you to be confused by some of the hype out there being misconstrued concerning this 60 Ksi value. Your idea is innovative. As your Nitinol rods on each side bend, and straighten, the generator will turn, and the size of those rods would simply need to be large enough to overcome the magnetic field required by the output load your generator is supplying. As the output load increases that your generator is supplying, the magnetic field will require more force into the rotor which is being driven by your Nitinol rods bending and straightening during each cycle.
Hope this helps.
73
In reading your last post it has come to my attention that you are under the impression that we wish to use the nitinol to spin a generator. This is
not the case. We instead want to use the nitinol to directly drive the wheels through a chain and sprocket setup. Using nitinol to turn a generator to
power a motor would be redundant and inefficient in the extreme. Unless as you say you were getting the waste heat somehow for "free" and in large
quantities.
Basically the device boils down to this simple idea that we have found a way to turn the back and forth motion of nitinol into 360 degree rotary motion using the double drive screwdriver as our power transmission. Now the real questions that remain to be answered are as follows. I will be referring to the actuator as a marty actuator since member Imamarty designed the actual actuator. I will be referring to the double drive screwdriver as the transmission since that is the function it plays in the device.
1, Can we generate enough force with an array of Marty actuators s sitting side by side running down the handle of the double drive screwdriver? In other words if we have say 15 of the actuators all firing off at once can we generate enough torque to physically turn the bicycle crankset?
2. Can the double drive mechanism stand up to this amount of force?
3. Can we get the actuator cycle times fast enough that it will generate a consistent and useful amount of rotational energy? IN other words can we make the cranks spin fast enough to propel the bike at a decent speed?
4. Does this take more or less power than a comparable bicycle motor? Now this is of course the big one! I'm hoping that we can generate more force for less power due to the high specific torque the nitinol will allow us to apply to the crankset. Contrast this with electric motors which have to be oversized specifically to allow for starting from a dead stop, and this is where we hope to come out a winner.
5. Are we still having fun? At the end of the day this is mostly about trying to take something that existed in the mind of our designer (marty) and make it come alive in the real world. Even if it's wildly impractical as long as we have fun I'll consider it a victory.
Basically the device boils down to this simple idea that we have found a way to turn the back and forth motion of nitinol into 360 degree rotary motion using the double drive screwdriver as our power transmission. Now the real questions that remain to be answered are as follows. I will be referring to the actuator as a marty actuator since member Imamarty designed the actual actuator. I will be referring to the double drive screwdriver as the transmission since that is the function it plays in the device.
1, Can we generate enough force with an array of Marty actuators s sitting side by side running down the handle of the double drive screwdriver? In other words if we have say 15 of the actuators all firing off at once can we generate enough torque to physically turn the bicycle crankset?
2. Can the double drive mechanism stand up to this amount of force?
3. Can we get the actuator cycle times fast enough that it will generate a consistent and useful amount of rotational energy? IN other words can we make the cranks spin fast enough to propel the bike at a decent speed?
4. Does this take more or less power than a comparable bicycle motor? Now this is of course the big one! I'm hoping that we can generate more force for less power due to the high specific torque the nitinol will allow us to apply to the crankset. Contrast this with electric motors which have to be oversized specifically to allow for starting from a dead stop, and this is where we hope to come out a winner.
5. Are we still having fun? At the end of the day this is mostly about trying to take something that existed in the mind of our designer (marty) and make it come alive in the real world. Even if it's wildly impractical as long as we have fun I'll consider it a victory.
reply to post by Destinyone
I'd love to see a picture of what you are thinking of even if it's just whipped up in mspaint. The original device design came from a non technical source and it's pretty amazing if you ask me, so don't downplay your potential abilities you never know you might come up with something amazing.
I'd love to see a picture of what you are thinking of even if it's just whipped up in mspaint. The original device design came from a non technical source and it's pretty amazing if you ask me, so don't downplay your potential abilities you never know you might come up with something amazing.
Originally posted by roguetechie
reply to post by Destinyone
I'd love to see a picture of what you are thinking of even if it's just whipped up in mspaint. The original device design came from a non technical source and it's pretty amazing if you ask me, so don't downplay your potential abilities you never know you might come up with something amazing.
I'll be driven to learn one of my graphic programs just to draw it for you. I think there is something to the design that will, even if minutely, enhance the energy creation potential. Utilizing nitinol in the tie rod/armature section is the key in what I'm *seeing*. The properties of nitinol would enable it to kick-start or add a bump in the motion quotient.Gravity being the other force in play.
What I see is 2 narrow ovals opposite each other like wheels on a wheelbarrow. The rod connecting the wheels, being nitinol with a memory bend in it. The bend, at a precise point in the revolution of the oval wheel snapping straight to give an oomph factor. See I can't even put it into words.....drawing will follow when I can.
aaacckkkkkk....I just read what I typed...I shouldn't be in this thread. But, I've already shown my arse, so I'll follow through with an etch-a-sketch type drawing some time soon. Back to my chair....
Des
So you want to use the nitinol to make the oval wheel turn better? I am definitely somewhat confused here but I do hope you'll produce a small sketch
for us since you definitely have me curious as to what you are thinking.
I was just trying to think of a way to use straight nitinol wires flexing and unflexing to give an off kilter rotary motion to an ornithopter's wings to try to replicate the adalbert schmid ornithopter on a small scale. I'm not having much luck though unfortunately.
I really think nitinol is a wonder material and plan on working with it as much as possible in as many applications as I can possibly think of.
I was just trying to think of a way to use straight nitinol wires flexing and unflexing to give an off kilter rotary motion to an ornithopter's wings to try to replicate the adalbert schmid ornithopter on a small scale. I'm not having much luck though unfortunately.
I really think nitinol is a wonder material and plan on working with it as much as possible in as many applications as I can possibly think of.
reply to post by roguetechie
LOL...no, not a wheel in the sense of a wheel rolling on the ground. But, as part of a mechanism/gear that produces motion/energy, using the least number of parts, to gain the maximum output. Sorry, I confused you with my confusing explanations. I belong in my chair in the back of the room, and in my head with fantasy ideas....
Des
LOL...no, not a wheel in the sense of a wheel rolling on the ground. But, as part of a mechanism/gear that produces motion/energy, using the least number of parts, to gain the maximum output. Sorry, I confused you with my confusing explanations. I belong in my chair in the back of the room, and in my head with fantasy ideas....
Des
reply to post by roguetechie
Please forgive me for my misunderstanding of your proposed design. When I first looked at your actuators i saw what appears to ge a generator winding in the belly of your drawing. I went back to review the posts and have a better understanding. The AutoCad drawing will only allow me to move the slider left / right, and I cannot see much of the design. But now I basically understand what you are trying to accomplish. And yes, we are having fun yet, although I may have seemed like a KillJoy in my prior misunderstanding of your design mechanics.
Q1:
This all depends on the diameter of the alloy wires, or the rectangular cross-sectional area of roll-formed alloy. And it would be sweet if you could fire multiple wires for initial starting torque, as you suggest, and then control the wires to fire in regular intervals after coming up to speed. Your controls could be set up such that any twist of the throttle would fire more than one at a time in order to increase velocity, and then back off to regular intervals when the throttle is rolled back somewhat. The control system could be easily driven by a Micro-PLC (Programmable Logic Controller), of which some are now capable of analog input/output. They are small enough to fit in your hand. Automation Direct makes an inexpensive model:
www.automationdirect.com...(Micro_to_Small,_Brick_-a-_Modular)/DirectLogic_ 05_(Micro_Brick_PLC)
PLC's are easy to configure for control systems. If you are a designer of any sort, I recommend you learn about them, and the simple programming required. I program, or modify machinery programs with them every week around the country, and can assist you if needed. (**You can quickly gain a 6-figure salaried career with PLC skills!)
Q2:
I do not have enough knowledge of the interior mechanics of this design yet to be able to provide any input.
Q3:
As we discussed earlier, this will depend on how fast your cycling time is in, and out of TTR. And of course, that depends on how fast you are able to cool the wires. The dilemma here is that you can cool small diameter wires quickly, but you need larger diameter wires for more power per wire. The answer then would be more small wires for a total necessary torque. But then you get into the dilemma of many more moving parts due to more multiples of your Imamarty actuators. Cooling is just as important as heating when devising Nitinol actuators that operate continuously. I am assuming you are only considering air-cooling, since liquid cooling would further increase the weight, and energy requirements of your power packs.
Q4:
I do not know the power requirements of current electric bicycle design, so I would not be able to provide input in this regard. And only through testing would you be able to determine the power requirements of the Nitinol-driven design. I would suggest only building a small working test mockup to begin with in order to save money. The results could be measured with a small Dynomometer, and design spec's multiplied from that data to accomdate actual full-size physical requirements, and wire sizes.
Q5:
Nitinol is always Fun! Even when we fail.... Because those failures are lessons that put you one more step ahead in knowledge towards your next design. Believe me, if you are interested enough in Nitinol, and you fail in this design, you ARE going to eventually come up with that idea nobody else has thought of. I only joined this conversation last week because I wanted to give you guys an edge by providing you some fundamental knowledge of the material charachteristics of this alloy. I dont know how many posts I have yet, but soon should be able to answer your questions directly.
73 (Best Rgards)
Please forgive me for my misunderstanding of your proposed design. When I first looked at your actuators i saw what appears to ge a generator winding in the belly of your drawing. I went back to review the posts and have a better understanding. The AutoCad drawing will only allow me to move the slider left / right, and I cannot see much of the design. But now I basically understand what you are trying to accomplish. And yes, we are having fun yet, although I may have seemed like a KillJoy in my prior misunderstanding of your design mechanics.
Q1:
This all depends on the diameter of the alloy wires, or the rectangular cross-sectional area of roll-formed alloy. And it would be sweet if you could fire multiple wires for initial starting torque, as you suggest, and then control the wires to fire in regular intervals after coming up to speed. Your controls could be set up such that any twist of the throttle would fire more than one at a time in order to increase velocity, and then back off to regular intervals when the throttle is rolled back somewhat. The control system could be easily driven by a Micro-PLC (Programmable Logic Controller), of which some are now capable of analog input/output. They are small enough to fit in your hand. Automation Direct makes an inexpensive model:
www.automationdirect.com...(Micro_to_Small,_Brick_-a-_Modular)/DirectLogic_ 05_(Micro_Brick_PLC)
PLC's are easy to configure for control systems. If you are a designer of any sort, I recommend you learn about them, and the simple programming required. I program, or modify machinery programs with them every week around the country, and can assist you if needed. (**You can quickly gain a 6-figure salaried career with PLC skills!)
Q2:
I do not have enough knowledge of the interior mechanics of this design yet to be able to provide any input.
Q3:
As we discussed earlier, this will depend on how fast your cycling time is in, and out of TTR. And of course, that depends on how fast you are able to cool the wires. The dilemma here is that you can cool small diameter wires quickly, but you need larger diameter wires for more power per wire. The answer then would be more small wires for a total necessary torque. But then you get into the dilemma of many more moving parts due to more multiples of your Imamarty actuators. Cooling is just as important as heating when devising Nitinol actuators that operate continuously. I am assuming you are only considering air-cooling, since liquid cooling would further increase the weight, and energy requirements of your power packs.
Q4:
I do not know the power requirements of current electric bicycle design, so I would not be able to provide input in this regard. And only through testing would you be able to determine the power requirements of the Nitinol-driven design. I would suggest only building a small working test mockup to begin with in order to save money. The results could be measured with a small Dynomometer, and design spec's multiplied from that data to accomdate actual full-size physical requirements, and wire sizes.
Q5:
Nitinol is always Fun! Even when we fail.... Because those failures are lessons that put you one more step ahead in knowledge towards your next design. Believe me, if you are interested enough in Nitinol, and you fail in this design, you ARE going to eventually come up with that idea nobody else has thought of. I only joined this conversation last week because I wanted to give you guys an edge by providing you some fundamental knowledge of the material charachteristics of this alloy. I dont know how many posts I have yet, but soon should be able to answer your questions directly.
73 (Best Rgards)
reply to post by Destinyone
1) You dont belong in the back of the room.
2) If it were not for fantasy ideas, nothing would be invented.
3) Get out of your Strato-Lounger and continue throwing out ideas......
But... If you have a really good one and want the invention rights, be careful what you share online until you at least have a Patent Pending on the design. I can provide you with enough fundamental Nitinol knowledge for you to advance a design on your own.
73
1) You dont belong in the back of the room.
2) If it were not for fantasy ideas, nothing would be invented.
3) Get out of your Strato-Lounger and continue throwing out ideas......
But... If you have a really good one and want the invention rights, be careful what you share online until you at least have a Patent Pending on the design. I can provide you with enough fundamental Nitinol knowledge for you to advance a design on your own.
73
reply to post by Destinyone
Can you sketch out a pencil drawing of your idea and maybe shoot it with a cellphone and post? I would be willing to look at it objectively, and I am sure Rogue would as well.
And this is for everyone in this thread:
Please do not mistake anything I say here as demeaning, or downplaying. I am a completely nuetral, yet objective observer. If I tell you something will not work based on the capabilities of Nitinol alloy that I understand, I am only trying to save you time, so that you can re-focus on a more capable design. If your design can incorporate Nitinol in a different fashion than what you first propose, I will offer design suggestions to make it happen. But I will in no way attempt to downplay any idea until we have completely vetted it out, and finally determined that it simply cannot work.
73
Can you sketch out a pencil drawing of your idea and maybe shoot it with a cellphone and post? I would be willing to look at it objectively, and I am sure Rogue would as well.
And this is for everyone in this thread:
Please do not mistake anything I say here as demeaning, or downplaying. I am a completely nuetral, yet objective observer. If I tell you something will not work based on the capabilities of Nitinol alloy that I understand, I am only trying to save you time, so that you can re-focus on a more capable design. If your design can incorporate Nitinol in a different fashion than what you first propose, I will offer design suggestions to make it happen. But I will in no way attempt to downplay any idea until we have completely vetted it out, and finally determined that it simply cannot work.
73
Thank you very much for giving much more to chew on including finding a way to "clutch" nitinol strands that are not in use at x or y throttle
setting. As for cooling the nitinol I actually found some micro water pumps that I think might be about perfect to run water or even ammonia
constantly through a sleeve around the nitinol wire like you initially suggested as far as having your bundles of wire submerged in a coolant bath and
using the electricity to push the wire over it's transition temperature briefly and then as soon as current is off start the cooling process.
Honestly my mind is chock full of ideas it's just a matter of trying to make workable products out of said ideas that's the trick.
Honestly my mind is chock full of ideas it's just a matter of trying to make workable products out of said ideas that's the trick.
new topics
-
UK and Europe Floods
Rant: 12 minutes ago -
FEMA kicks hurricane survivors out of temporary housing into snowstorm and freezing temperatures
Disaster Conspiracies: 36 minutes ago -
Failures of leadership on display
US Political Madness: 47 minutes ago -
Power grid faults surged right before Los Angeles wildfires began
Mainstream News: 48 minutes ago -
Tustin California Military equipment stolen BIG equipment .
Social Issues and Civil Unrest: 1 hours ago -
PALES-TINE, PALES-ADES and the Australian Aboriginal "Lightning Man"
Dreams & Predictions: 1 hours ago
top topics
-
Tustin California Military equipment stolen BIG equipment .
Social Issues and Civil Unrest: 1 hours ago, 8 flags -
Just Came Across These Unusual Old UFO Pics
Aliens and UFOs: 17 hours ago, 7 flags -
How To Spot Fake U.F.O. Photos
Aliens and UFOs: 13 hours ago, 6 flags -
Scary video of face in an abandoned house
Paranormal Studies: 15 hours ago, 5 flags -
Failures of leadership on display
US Political Madness: 47 minutes ago, 5 flags -
FEMA kicks hurricane survivors out of temporary housing into snowstorm and freezing temperatures
Disaster Conspiracies: 36 minutes ago, 5 flags -
Power grid faults surged right before Los Angeles wildfires began
Mainstream News: 48 minutes ago, 4 flags -
PALES-TINE, PALES-ADES and the Australian Aboriginal "Lightning Man"
Dreams & Predictions: 1 hours ago, 3 flags -
UK and Europe Floods
Rant: 12 minutes ago, 1 flags
active topics
-
Post A Funny (T&C Friendly) Pic Part IV: The LOL awakens!
General Chit Chat • 8016 • : underpass61 -
Could the Civil War have been about piracy?
History • 8 • : Solvedit -
Sepultura - Territory - With New Drummer Greyson Nekrutman
Music • 1 • : gortex -
This should be plastered all over the airwaves
Mainstream News • 57 • : Xtrozero -
Trump says ownership of Greenland 'is an absolute necessity'
Other Current Events • 193 • : bastion -
Los Angeles brush fires latest: 2 blazes threaten structures, prompt evacuations
Mainstream News • 401 • : xuenchen -
Tustin California Military equipment stolen BIG equipment .
Social Issues and Civil Unrest • 4 • : Phoenix -
FEMA kicks hurricane survivors out of temporary housing into snowstorm and freezing temperatures
Disaster Conspiracies • 5 • : xuenchen -
UK and Europe Floods
Rant • 0 • : crayzeed -
How To Spot Fake U.F.O. Photos
Aliens and UFOs • 7 • : Solvedit